もくじ
概要
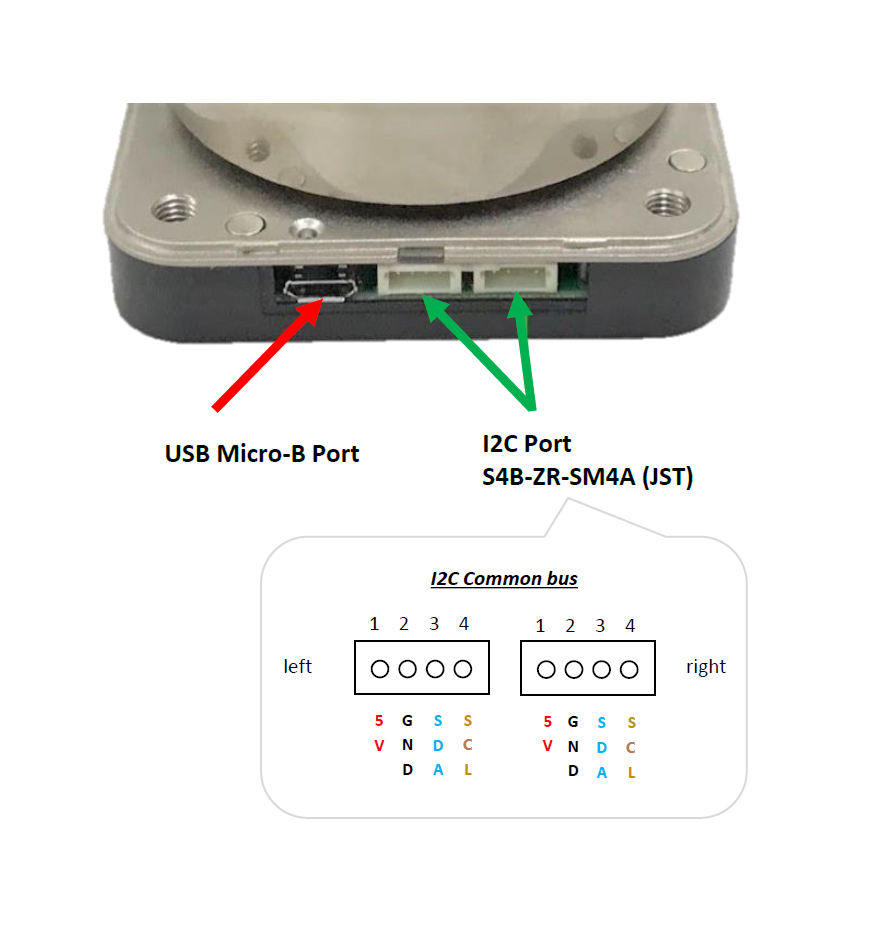
KeiganMotor は、有線によるコントロールを可能にするため、USB Micro-B ポート と I2C ポート(2個共通バス)を有しています。
- USB: お使いのPC等と、USB Type-A to micro-B ケーブル等で接続
- I2C: お使いのマイコンボード(Arduino, Raspberry pi 等)と接続
I2Cポートのコネクタは 日本圧着端子(JST)のZHコネクタ: S4B-ZR-SM4A を使用しています。適合するハウジングは、同社製 ZHR-4 となります。
有線ポートへのアクセス
以下を参照してコネクタカバーを外して下さい。USB Micro-Bポート と I2C ポートがあります。
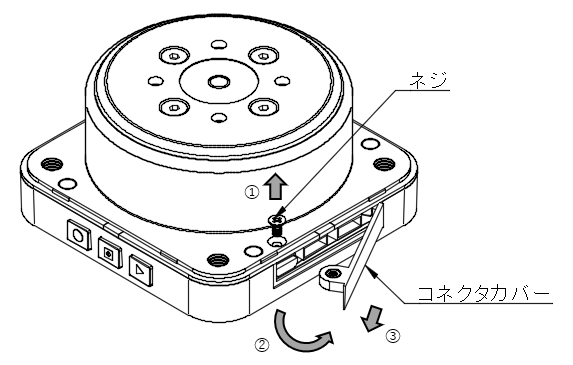
- 精密ドライバーでコネクタカバーを固定しているネジを外します。
- コネクタカバーのネジが付いていた側をつまみ、反対側を支点にしてコネクタカバーを外します。
- コネクタカバーを引き抜きます。
コネクタカバーのネジがローターに磁力で吸着する恐れがありますので、ネジを外す際には必ず指でネジを押さえてさい。
有線ポートの詳細
コネクタポートを外すと、下図のコネクタがあります。I2Cのピン配置は下図を参照して下さい。
5V と GND のピン配置に誤りがあり、図の差し替えを行いました。正しくは以下の図を参照下さい。(2018/11/16)
有線通信時の設定
USBシリアル通信時の設定
Baudrate: 115200
Data Bits: 8
Parity: none
Stop Bits: 1
Flow Control: CTS on, RTS on(ハードウェア)
Data Bits: 8
Parity: none
Stop Bits: 1
Flow Control: CTS on, RTS on(ハードウェア)
I2C通信時のデフォルト設定
KeiganMotor スレーブアドレス: 0x20
(I2CSlaveAddres コマンドにより変更が可能です)